<Gram-Schmidt orthonormalization & QR decomposition>
1. Install Packages
2. Gram-Schmidt orthonormalization
3. QR decomposition
Install Packages
# visualization을 위한 helper code입니다.
from urllib.request import urlretrieve
URL = 'https://go.gwu.edu/engcomp4plot'
urlretrieve(URL, 'plot_helper.py')
import sys
sys.path.append('../scripts/')
# 다음 세 custom function (1)plot_vector, (2)plot_linear_transformation, (3) plot_linear_transformations
# 을 사용할 것입니다.
from plot_helper import *
import matplotlib.pyplot as plt
import numpy as np
from mpl_toolkits.mplot3d import Axes3D
import scipy as sp
import scipy.linalg
import sympy as sy
sy.init_printing()
np.set_printoptions(precision=3)
np.set_printoptions(suppress=True)Gram-Schmidt orthonormalization
Gram-Schmidt orthonormalization:
주어진 basis를 orthonormal basis로 만들기 위한 method
{x1, x2, x3}를 R3의 basis라고 하고, x1= (3, 6, 2), x2 = (1, 2, 4), x3 = (2, -2, 1)라고 할 시,
x1, x2, x3은 서로 orthogonal이 아니다. (x1·x2 != 0)
→ Gram-Schmidt orthonormalization을 이용해 이를 orthonormal basis u1, u2, u3로 변환

s = np.linspace(-1, 1, 10)
t = np.linspace(-1, 1, 10)
S, T = np.meshgrid(s, t)
vec = np.array([[[0,0,0,3, 6, 2]],
[[0,0,0,1, 2, 4]],
[[0,0,0,2, -2, 1]]])
# x1과 x_2의 linear combination, 즉 span
X = vec[0,:,3] * S + vec[1,:,3] * T
Y = vec[0,:,4] * S + vec[1,:,4] * T
Z = vec[0,:,5] * S + vec[1,:,5] * T
fig = plt.figure(figsize = (7, 7))
ax = fig.add_subplot(projection='3d')
# x1, x2가 span하는 공간을 격자로 나타냅니다.
ax.plot_wireframe(X, Y, Z, linewidth = 1.5, alpha = .3)
############################# x1 and x2 ##############################
colors = ['r','b','g']
s = ['$x_1$', '$x_2$', '$x_3$']
for i in range(vec.shape[0]):
X,Y,Z,U,V,W = zip(*vec[i,:,:])
ax.quiver(X, Y, Z, U, V, W, length=1, normalize=False,
color = colors[i], alpha = .6,arrow_length_ratio = .08, pivot = 'tail',
linestyles = 'solid',linewidths = 3)
ax.text(vec[i,:,3][0], vec[i,:,4][0], vec[i,:,5][0], s = s[i], size = 15)
ax.set_xlabel('x-axis')
ax.set_ylabel('y-axis')
ax.set_zlabel('z-axis')
plt.show()
x1 vector를 고정 (v1 = x1)

span {v1}을 W1이라고 할 시, v2를 구하기 위해 x2를 W1에 orthogonal projection한 vector

x1 = np.array([3, 6, 2])
x2 = np.array([1, 2, 4])
x3 = np.array([2, -2, 1])
v1 = x1
u1 = v1 / (np.sqrt(v1.dot(v1)))
x2_hat = ((x2.dot(u1)) / (u1.dot(u1))) * u1
v2 = x2 - x2_hat
u2 = v2 / (np.sqrt(v2.dot(v2)))
print(u1 @ u2)
print(x2_hat @ u2)
s = np.linspace(-1, 1, 10)
t = np.linspace(-1, 1, 10)
S, T = np.meshgrid(s, t)
# x1과 x_2의 linear combination, 즉 span
X = x1[0] * S + x2[0] * T
Y = x1[1] * S + x2[1] * T
Z = x1[2] * S + x2[2] * T
fig = plt.figure(figsize = (10, 10))
ax = fig.add_subplot(projection='3d')
# x1, x2가 span하는 공간을 격자로 나타냅니다.
ax.plot_wireframe(X, Y, Z, linewidth = 1.5, alpha = .3)
############################# x1, x2, x3, x2_hat, v2 ##############################
vec = np.array([[0, 0, 0, x1[0], x1[1], x1[2]]])
X, Y, Z, U, V, W = zip(*vec)
ax.quiver(X, Y, Z, U, V, W, length=1, normalize=False, color = 'red', alpha = .6,arrow_length_ratio = .08, pivot = 'tail',
linestyles = 'solid',linewidths = 3)
vec = np.array([[0, 0, 0, x2[0], x2[1], x2[2]]])
X, Y, Z, U, V, W = zip(*vec)
ax.quiver(X, Y, Z, U, V, W, length=1, normalize=False, color = 'blue', alpha = .6,arrow_length_ratio = .08, pivot = 'tail',
linestyles = 'solid',linewidths = 3)
vec = np.array([[0, 0, 0, x3[0], x3[1], x3[2]]])
X, Y, Z, U, V, W = zip(*vec)
ax.quiver(X, Y, Z, U, V, W, length=1, normalize=False, color = 'green', alpha = .6,arrow_length_ratio = .08, pivot = 'tail',
linestyles = 'solid',linewidths = 3)
vec = np.array([[0, 0, 0, x2_hat[0],x2_hat[1], x2_hat[2]]])
X, Y, Z, U, V, W = zip(*vec)
ax.quiver(X, Y, Z, U, V, W, length=1, normalize=False, color = 'blue', alpha = .6,arrow_length_ratio = .12, pivot = 'tail',
linestyles = 'solid',linewidths = 3)
vec = np.array([[0, 0, 0, v2[0], v2[1], v2[2]]])
X, Y, Z, U, V, W = zip(*vec)
ax.quiver(X, Y, Z, U, V, W, length=1, normalize=False, color = 'purple', alpha = .6,arrow_length_ratio = .08, pivot = 'tail',
linestyles = 'solid',linewidths = 3)
ax.text(x1[0], x1[1], x1[2], '$\mathbf{x}_1 = \mathbf{v}_1 $', size = 15)
ax.text(x2[0], x2[1], x2[2], '$\mathbf{x}_2$', size = 15)
ax.text(x3[0], x3[1], x3[2], '$\mathbf{x}_3$', size = 15)
ax.text(x2_hat[0], x2_hat[1], x2_hat[2], '$\hat{\mathbf{x_2}}$', size = 15)
ax.text(v2[0], v2[1], v2[2], '$\mathbf{v}_2$', size = 15)
ax.set_xlabel('x-axis')
ax.set_ylabel('y-axis')
ax.set_zlabel('z-axis')
################################# Dashed Line ##################################
point1 = [x2_hat[0], x2_hat[1], x2_hat[2]]
point2 = [x2[0], x2[1], x2[2]]
line1 = np.array([point1, point2])
ax.plot(line1[:,0], line1[:,1], line1[:, 2], c = 'b', lw = 3.5,alpha =0.5, ls = '--')
point1 = [v2[0], v2[1], v2[2]]
point2 = [x2[0], x2[1], x2[2]]
line1 = np.array([point1, point2])
ax.plot(line1[:,0], line1[:,1], line1[:, 2], c = 'b', lw = 3.5,alpha =0.5, ls = '--')
plt.show()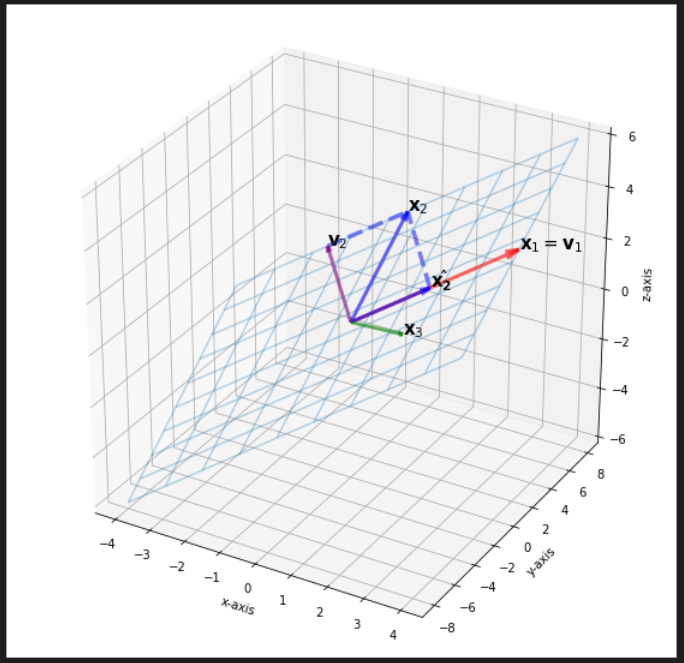
v1, v2를 구했으니, 세 번째 basis인 v3를 구하려면,
span {v1, v2}를 W2라고 하고, x3를 W2에 orthogonal projection 한 vector

x3_hat = (x3.dot(u1)) / (u1.dot(u1)) * u1 + (x3.dot(u2)) / (u2.dot(u2)) * u2
v3 = x3 - x3_hat
u3 = v3 / (np.sqrt(v3.dot(v3)))
print(u1 @ u3)
print(u2 @ u3)
print(x3_hat @ u3)
s = np.linspace(-1, 1, 10)
t = np.linspace(-1, 1, 10)
S, T = np.meshgrid(s, t)
# x1과 x_2의 linear combination, 즉 span
X = x1[0] * S + x2[0] * T
Y = x1[1] * S + x2[1] * T
Z = x1[2] * S + x2[2] * T
fig = plt.figure(figsize = (9, 9))
ax = fig.add_subplot(projection='3d')
# x1, x2가 span하는 공간을 격자로 나타냅니다.
ax.plot_wireframe(X, Y, Z, linewidth = 1.5, alpha = .3)
############################# x1, x2, x2_hat, v2, x3, x3_hat, v3 ##############################
vec = np.array([[0, 0, 0, x1[0], x1[1], x1[2]]])
X, Y, Z, U, V, W = zip(*vec)
ax.quiver(X, Y, Z, U, V, W, length=1, normalize=False, color = 'red', alpha = .6,arrow_length_ratio = .08, pivot = 'tail',
linestyles = 'solid',linewidths = 3)
vec = np.array([[0, 0, 0, x2[0], x2[1], x2[2]]])
X, Y, Z, U, V, W = zip(*vec)
ax.quiver(X, Y, Z, U, V, W, length=1, normalize=False, color = 'red', alpha = .6,arrow_length_ratio = .08, pivot = 'tail',
linestyles = 'solid',linewidths = 3)
vec = np.array([[0, 0, 0, x2_hat[0],x2_hat[1], x2_hat[2]]])
X, Y, Z, U, V, W = zip(*vec)
ax.quiver(X, Y, Z, U, V, W, length=1, normalize=False, color = 'blue', alpha = .6,arrow_length_ratio = .12, pivot = 'tail',
linestyles = 'solid',linewidths = 3)
vec = np.array([[0, 0, 0, v2[0], v2[1], v2[2]]])
X, Y, Z, U, V, W = zip(*vec)
ax.quiver(X, Y, Z, U, V, W, length=1, normalize=False, color = 'purple', alpha = .6,arrow_length_ratio = .08, pivot = 'tail',
linestyles = 'solid',linewidths = 3)
vec = np.array([[0, 0, 0, x3[0], x3[1], x3[2]]])
X, Y, Z, U, V, W = zip(*vec)
ax.quiver(X, Y, Z, U, V, W, length=1, normalize=False, color = 'red', alpha = .6,arrow_length_ratio = .08, pivot = 'tail',
linestyles = 'solid',linewidths = 3)
vec = np.array([[0, 0, 0, x3_hat[0], x3_hat[1], x3_hat[2]]])
X, Y, Z, U, V, W = zip(*vec)
ax.quiver(X, Y, Z, U, V, W, length=1, normalize=False, color = 'black', alpha = .6,arrow_length_ratio = .08, pivot = 'tail',
linestyles = 'solid',linewidths = 3)
vec = np.array([[0, 0, 0, v3[0], v3[1], v3[2]]])
X, Y, Z, U, V, W = zip(*vec)
ax.quiver(X, Y, Z, U, V, W, length=1, normalize=False, color = 'purple', alpha = .6,arrow_length_ratio = .08, pivot = 'tail',
linestyles = 'solid',linewidths = 3)
ax.text(x1[0], x1[1], x1[2], '$\mathbf{x}_1 = \mathbf{v}_1 $', size = 15)
ax.text(x2[0], x2[1], x2[2], '$\mathbf{x}_2$', size = 15)
ax.text(x2_hat[0], x2_hat[1], x2_hat[2], '$\hat{\mathbf{x}}_2$', size = 15)
ax.text(v2[0], v2[1], v2[2], '$\mathbf{v}_2$', size = 15)
ax.text(x3[0], x3[1], x3[2], '$\mathbf{x}_3$', size = 15)
ax.text(x3_hat[0], x3_hat[1], x3_hat[2], '$\hat{\mathbf{x}}_3$', size = 15)
ax.text(v3[0], v3[1], v3[2], '$\mathbf{v}_3$', size = 15)
ax.set_xlabel('x-axis')
ax.set_ylabel('y-axis')
ax.set_zlabel('z-axis')
################################# Dashed Line ##################################
point1 = [x2_hat[0], x2_hat[1], x2_hat[2]]
point2 = [x2[0], x2[1], x2[2]]
line1 = np.array([point1, point2])
ax.plot(line1[:,0], line1[:,1], line1[:, 2], c = 'b', lw = 3.5,alpha =0.5, ls = '--')
point1 = [v2[0], v2[1], v2[2]]
point2 = [x2[0], x2[1], x2[2]]
line1 = np.array([point1, point2])
ax.plot(line1[:,0], line1[:,1], line1[:, 2], c = 'b', lw = 3.5,alpha =0.5, ls = '--')
point1 = [x3_hat[0], x3_hat[1], x3_hat[2]]
point2 = [x3[0], x3[1], x3[2]]
line1 = np.array([point1, point2])
ax.plot(line1[:,0], line1[:,1], line1[:, 2], c = 'b', lw = 3.5,alpha =0.5, ls = '--')
################################ Axes ######################################
ax.set_xlim3d(-5, 5)
ax.set_ylim3d(-5, 5)
ax.set_zlim3d(-5, 5)
plt.show()
- u1은 x1의 Linear Combination (u1 = x1)
- u2는 x1, x2의 Linear Combination
- u3는 x1, x2, x3의 Linear Combination
→ Span의 subspace가 같다.
→ 세 vector의 Linear Combination으로 만들 수 있는 vector가 같다.
→ span {x1, x2, x3} = span {u1, u2, u3}
따라서, 세 vector u1, u2, u3를 각 column으로 하는 Matrix U는 orthogonal Matrix가 된다.
U = np.vstack((u1,u2,u3)).T
U.T@U
U@U.T # UU^T는 identity matrix가 됩니다.
QR decomposition
Gram-Schmidt를 하면 자연스럽게 Matrix A의 QR decomposition을 수행할 수 있다.

A = np.array([[3,1,2],[6,2,-2],[2,4,1]])
Q = np.vstack((u1,u2,u3)).T
r1 = np.array([np.sqrt(v1.dot(v1)), 0, 0])
r2 = np.array([x2.dot(u1) / u1.dot(u1), np.sqrt(v2.dot(v2)), 0])
r3 = np.array([x3.dot(u1) / u1.dot(u1), x3.dot(u2) / u2.dot(u2), np.sqrt(v3.dot(v3))])
R = np.vstack((r1, r2, r3)).T
print(Q)
print(R)
print('')
print(A)
print(Q@R)
Numpy의 linalg.qr 함수 이용
Q,R = np.linalg.qr(A)
print(Q)
print(R)
'Mathematics > Linear Algebra' 카테고리의 다른 글
| Advanced Eigendecomposition (0) | 2022.05.12 |
|---|---|
| Eigendecomposition (0) | 2022.05.11 |
| Determinant, Least Square (0) | 2022.05.04 |
| Basis, Span, Change of Basis (0) | 2022.05.03 |
| Linear System, Inverse Matrix, Linear Combination (0) | 2022.05.02 |



